


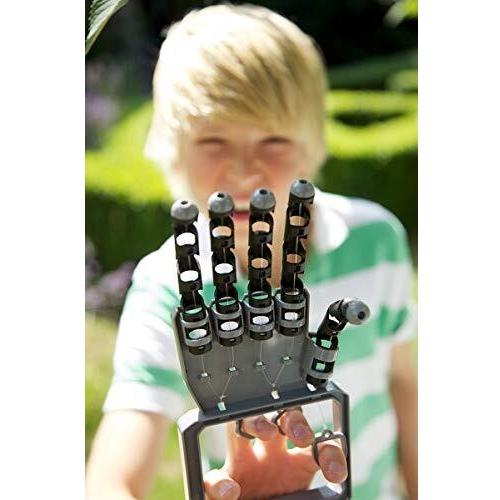
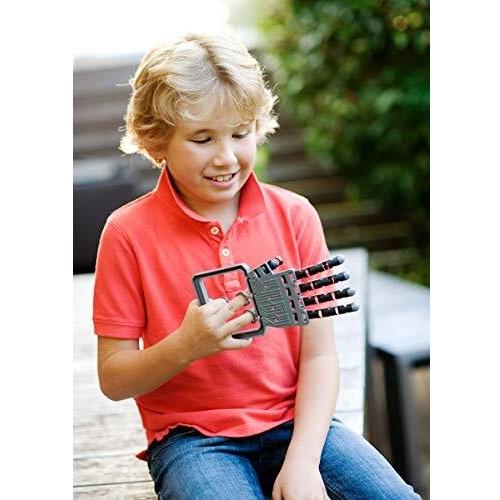
Build Your Own Robotic Hand
12.99 GBP
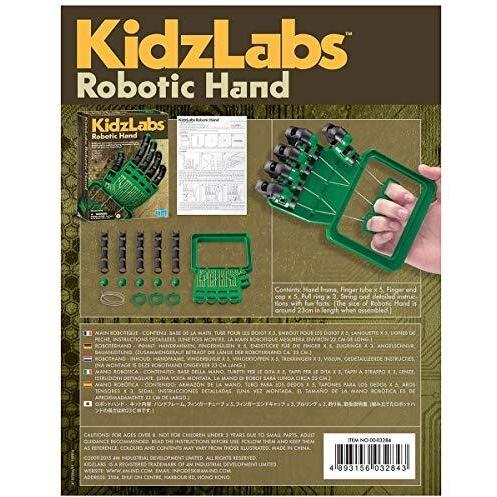
Create a lifelike robotic hand that flexes like a real finger, featuring interchangeable parts, adjustable tension, and a simple code interface for custom grip patterns—ideal for hands‑on STEM exploration.
Share: ![]()
![]()
![]()
![]()
![]()
![]()
| Brand | 4M |
| MPN | 4160 |
| SKU | 00-03284 |
| EAN | 4893156032843 |
| ASIN | B003JSMW88 |
| Model | GG4161 |
| Author | GREAT GIZMOS |
Related products

4M KidzLab Mega Water-Powered Arm
24.99 GBP
4M Kidz Labs STEM Balancing Robot
15.99 GBP
Kidz Labs – Hydraulic Robotic Arm
3.19 AUD